本文章学习总结自知乎大 V陈光的《无人驾驶干货铺》专栏,查阅原文请移步这里。
1 正文
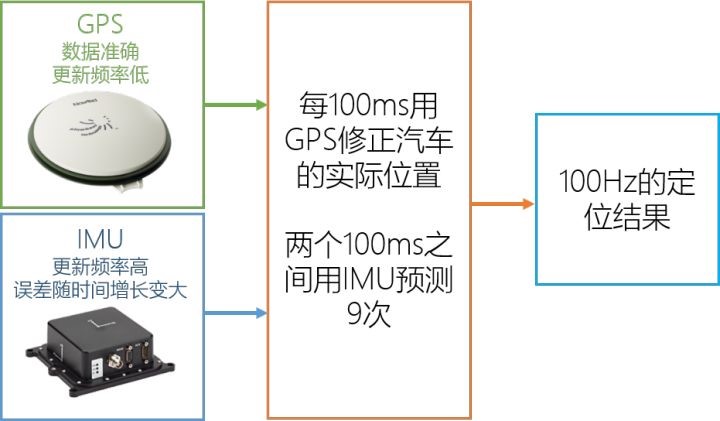
惯性测量单元(Inertial Measurement Unit,IMU)用于实时测量被测单元的姿态,通常指由 3 个加速度计和 3 个陀螺仪组成的组合单元,之前做平衡车时用到的 MPU6050 即为一种典型的 IMU 芯片。加速度计和陀螺仪安装在互相垂直的测量轴上。低精度的 IMU 可以通过其它方式进行修正,GPS 用于修正位置的长期漂移,气压计用于修正高度,磁力计用于修正姿态。在无人驾驶系统中,GPS 的更新频率一般为 10Hz,IMU 的更新频率一般为 100Hz,GPS+IMU 的组合定位方式,可以给出频率 100Hz 的定位输出。下图是两传感器数据融合的原理图:
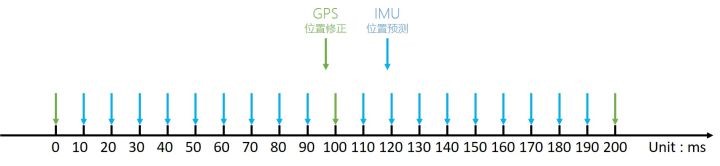
运行在控制器上的软件对信息的处理流程在时间维度上类似下图:
在 0~100ms 的周期中,使用 IMU 进行 9 次位置的估计,待新的 GPS 定位数据进来时,则进行修正,以此实现高频率的定位结果输出。
2 参考
- 无人驾驶技术入门(四)| 百度无人车传感器 IMU 深入剖析

