本文章学习总结自知乎大 V陈光的《无人驾驶干货铺》专栏,查阅原文请移步这里。
1 正文
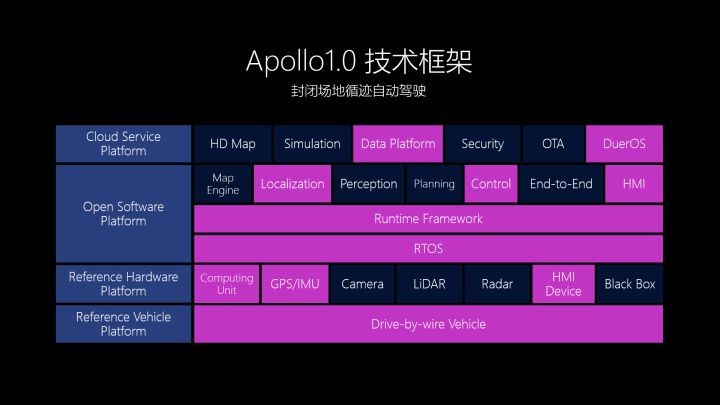
百度 Apollo 1.0 技术框架如下图所示:
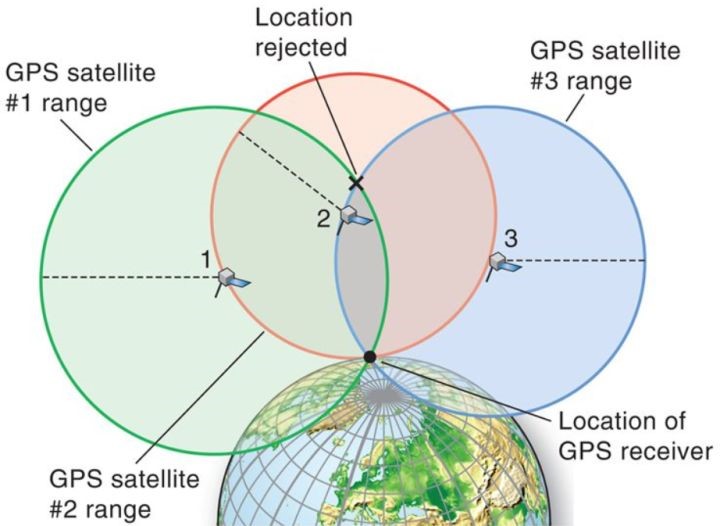
GPS 全球定位系统(Global Position System)定位原理为三角定位法(Triangulation),如下图所示,通过测量无人车分别距三颗卫星的距离来对无人车进行唯一定位:
为降低天气、云层对定位的影响,引入了差分 GPS 的技术,原理如下图所示:
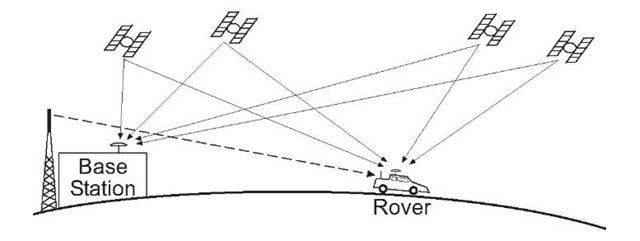
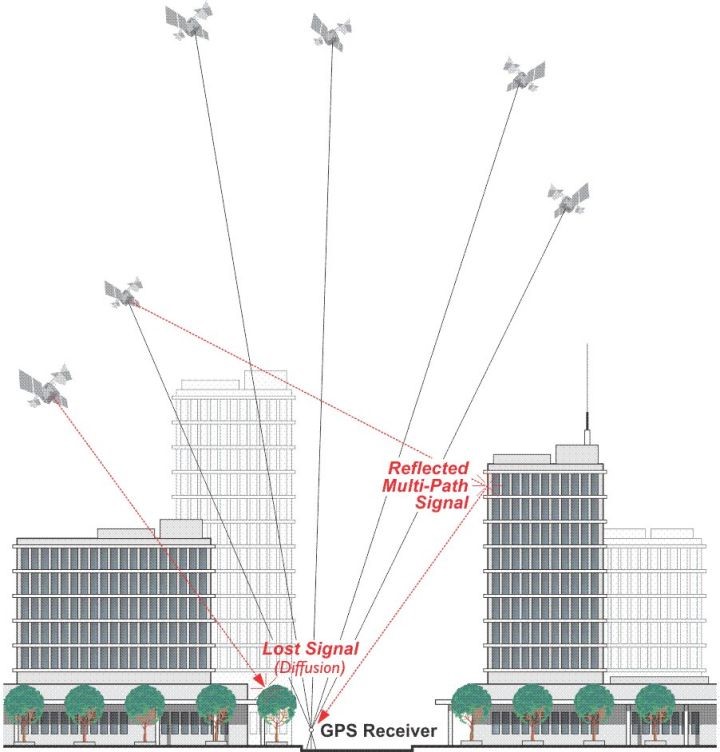
在地面上建立基站(Base Station),基站在建立时可得到其精确的位置信息(经纬度),同时基站具有接收卫星信号的功能。当基站的 GPS 接收机与车载 GPS 接收机相距较近时(<30km),可以认为两者的 GPS 信号通过的是同一片大气区域,即两者的信号误差基本一致。根据基站的精确位置和信号传播时间,可反推此时天气原因导致的信号传播误差,之后利用该误差便可修正车载 GPS 信号,从而降低云层、天气情况等对信号传输的影响。利用差分 GPS 技术,可使无人车定位精度由十米级别提升至米级。差分 GPS 技术可以解决定位的精度问题,但是无法解决遮挡和反射问题,当无人车在高楼林立的环境中行驶时,会发生信号丢失和多路径信号(Multi-Path Signal)的问题:
同时,GPS 定位频率不高,相当于定位实时性较差。
2 参考
- 无人驾驶技术入门(三)| 百度无人车传感器 GPS 深入剖析

