本文章学习总结自知乎大 V陈光的《无人驾驶干货铺》专栏,查阅原文请移步这里
1 正文
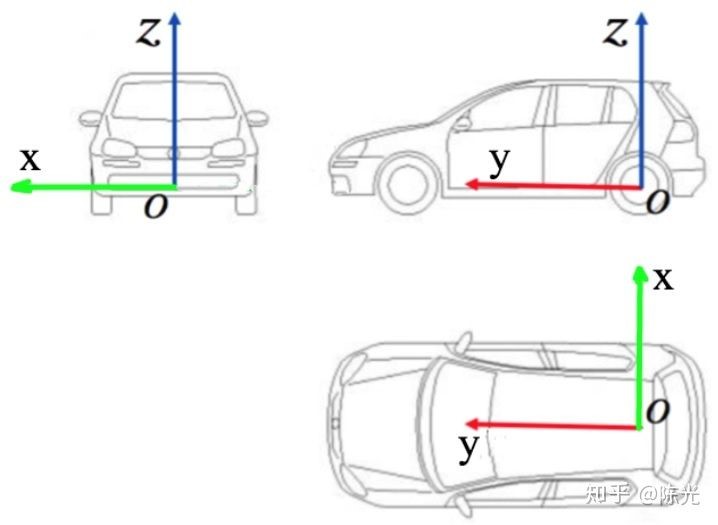
车辆坐标系的原点在车辆后轮轴的中心,如下图所示:
以安装在无人车左前方的角雷达(Corner radar)为例,角雷达的安装位置和坐标系如下图绿线所示:
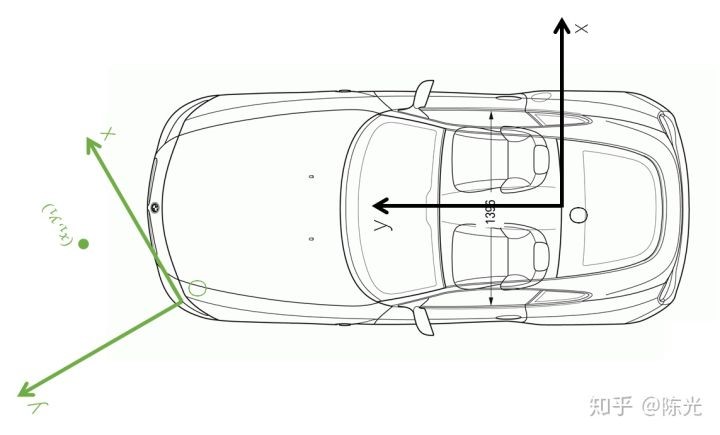
角雷达检测到的障碍物如图中的绿点所示,绿点在雷达坐标系下的坐标为$(x_1, y_1)$,为了便于理解暂不加入$z$方向的坐标,绿点转换到自车坐标系下需要经过一定的数学运算:
(1) 旋转
将角雷达坐标系沿着$z$轴进行一定角度的旋转,新坐标系与自车坐标系相平行,
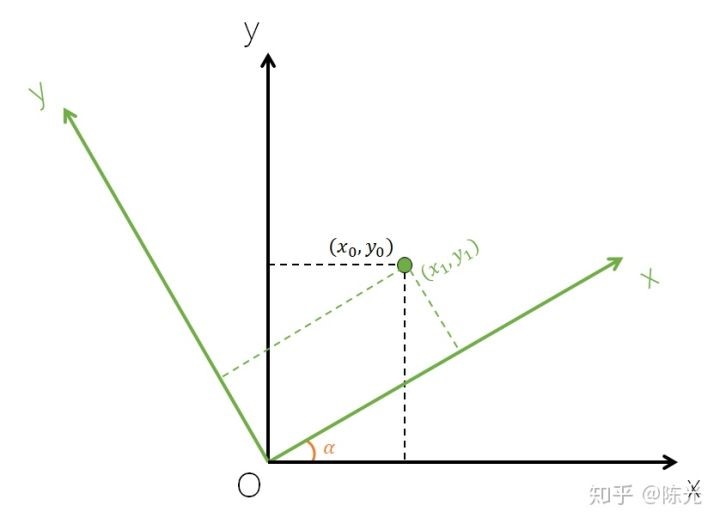
障碍物在角雷达坐标系下的坐标为$(x_1, y_1)$,假设障碍物在旋转后的新坐标系下的坐标为$(x_0, y_0)$,安装角度$α$(可测量),做辅助线后如下图所示:
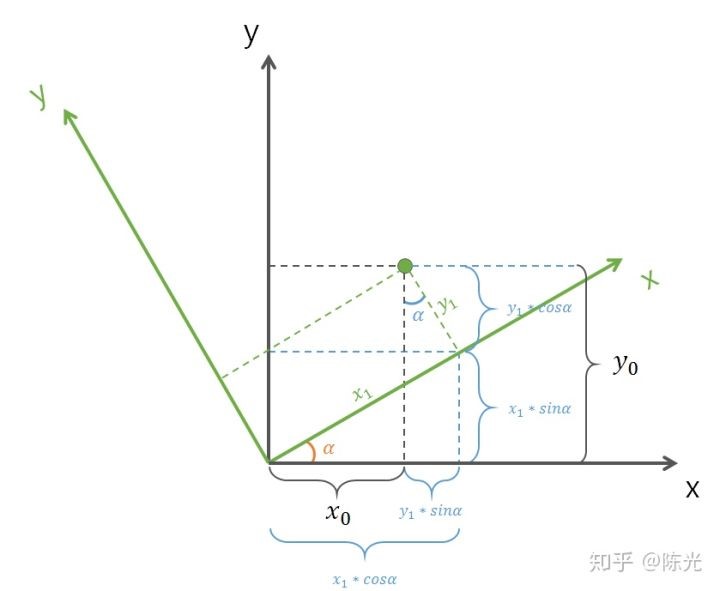
根据几何关系可得:
矩阵形式为:
由于旋转是绕$z$轴旋转,因此旋转前后$z$值保持不变,即$z_0$=$z_1$,故:
$R_z$为绕$z$轴的旋转矩阵,同样也有绕$x$轴的旋转矩阵$R_x$和绕$y$轴的旋转矩阵$R_y$,考虑到一般情况,上式变换为:
再加上一个平移矩阵,就能够得到障碍物在自车坐标系中的最终坐标描述:
以上过程也称为欧拉变换,但是欧拉变换会有一个不可避免的问题——万向锁,欧拉变换的过程中在某些特殊情况时,会导致少一个维度。为了解决欧拉变换存在的万向锁问题,引入了四元数的概念。四元数除了能够解决万向锁的问题外,还能在一定程度上简化计算,因而百度 Apollo 也选择了四元数作为各个传感器安装位置和角度的存储介质。
2 参考
- 无人驾驶技术入门(十二)| 无人驾驶中的坐标转换

