本文章学习总结自知乎大 V陈光的《无人驾驶干货铺》专栏,查阅原文请移步这里
1 正文
简单来讲,卡尔曼滤波器就是根据上一时刻的状态,预测当前时刻的状态,将预测的状态量与当前时刻的观测量进行加权,加权后的结果才认为是当前实际的状态量,而非仅听信当前的观测量。卡尔曼滤波过程可主要概括为以下三步:
(1) 初始化(Initialization)
假设有个小车在道路上向右侧做匀速运动,在左侧安装了一个可以测量小车距离和速度的传感器,传感器每 1 秒测一次小车的位置 $s$ 和速度 $v$,如下图所示:
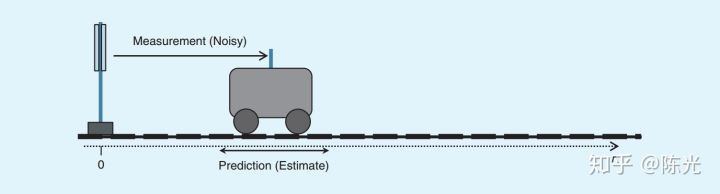
用向量 $x_t$ 来表示当前小车的状态,该向量也是最终的输出结果,被称作状态向量(state vector):
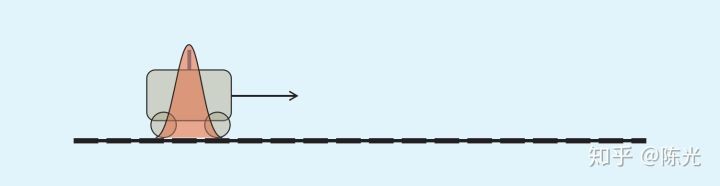
由于测量误差的存在,传感器无法直接获取小车位置的真值,只能获取在真值附近的一个近似值,可以假设测量值在真值附近服从高斯分布。如下图所示,测量值分布在红色区域内的左侧或右侧,真值则在红色区域的波峰处:
由于是第一次测量,没有小车的历史信息,认为小车在 $t=1$ 秒时的状态量 $x_1$ 与观测量 $z_1$ 相等:
(2) 预测(Prediction)
预测是卡尔曼滤波中很重要的一步,这一步相当于使用历史信息对未来的位置进行推测。根据第 1 秒小车的位置和速度,可以推测第 2 秒时,小车所在的位置应该如下图所示:

会发现,图中红色区域的范围变大了,这是因为预测时加入了速度估计的噪声,是一个放大不确定性的过程。根据小车第 1 秒的状态量进行预测,得到预测的第 2 秒的状态量 $x_{pre}$:
其中,下脚标 $pre$ 是 prediction 的简称。时间间隔为 1 秒,所以预测位置为距离+速度*1,由于小车做匀速运动,因此速度保持不变。
(3) 观测(Measurement)
在第 2 秒时,传感器对小车的位置做了一次观测,认为小车在第 2 秒时的观测量为 $z_2$:
显然,第二次观测的结果也是存在误差的,将预测的小车位置与实际观测到的小车位置放在同一个图上,即可看到:
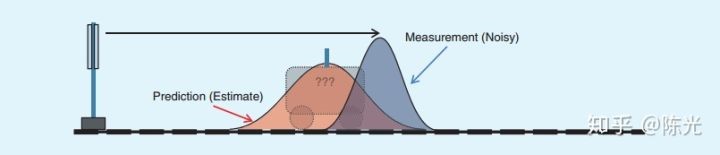
图中红色区域为预测的小车位置,蓝色区域为第 2 秒的观测结果。显然,这两个结果都在真值附近。为得到尽可能接近真值的结果,将这两个区域的结果进行加权,取加权后的值作为第 2 秒的状态量。为了方便理解,可以将第 2 秒的状态量写成:
其中,$w_1$ 为预测结果的权值,$w_2$ 为观测结果的权值。两个权值的计算是根据预测结果和观测结果的不确定性来的,这个不确定性就是高斯分布中方差的大小,方差越大,波形分布越广,不确定性越高,给的权值越低。加权后的状态向量的分布可以用下图中绿色区域表示:

可以发现,绿色区域的方差均小于红色区域和蓝色区域,原因是进行加权运算时,需要将两个高斯分布进行乘法运算,得到的新的高斯分布的方差比两个做乘法的高斯分布都小。两个不那么确定的分布,最终得到了一个相对确定的分布。
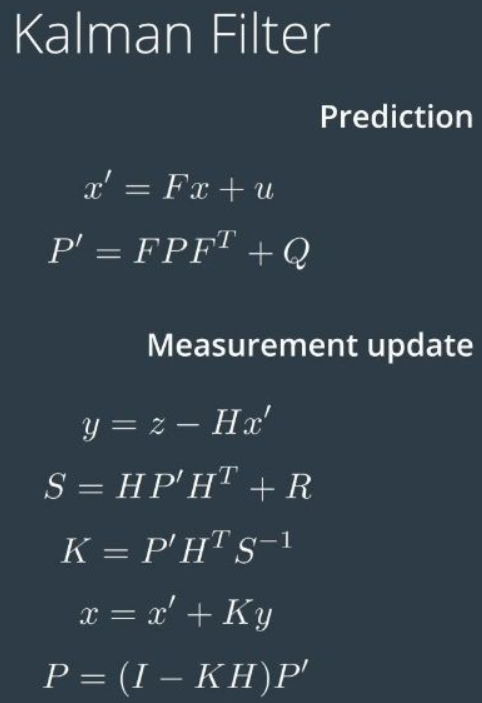
第 1 秒的初始化以及第 2 秒的预测、观测,实现了卡尔曼滤波的第一个周期。同样地,根据第 2 秒的状态量做第 3 秒的预测,再与第 3 秒的观测量进行加权,就得到了第 3 秒的状态量;再根据第 3 秒的状态量做第 4 秒的预测,再与第 4 秒的观测量进行加权,就得到了第 4 秒的状态量。以此往复,就实现了一个真正意义上的卡尔曼滤波器。卡尔曼滤波器的理论公式如下所示:
下面结合上面的公式,用 C++代码实现初始化、预测、观测的过程。由于公式中涉及大量的矩阵转置和求逆运算,使用开源的矩阵运算库——Eigen。
代码:初始化(Initialization)
初始化阶段,需要将各个变量初始化,对于不同的运动模型,其状态向量不同,对于上文中小车的例子,只需距离 $s$ 和速度 $v$ 就可以表示小车的状态;再比如一个二维空间中的点,需要 $x$ 方向上的距离和速度及 $y$ 方向上的距离和速度才能表示其状态,这样的状态量就有 4 个变量。因此使用 Eigen 库中非定长的数据结构,下图中的VerctorXd表示 X 维的列向量,其中的元素数据类型为double:
1 |
|
这里,新建了一个KalmanFilter类,其中定义了一个叫做x_的变量,表示小车的状态向量。
代码:预测(Prediction)
完成初始化后,开始写 Prediction 部分的代码。首先是公式:
这里的 $x$ 为上一时刻状态量,通过左乘一个状态转移矩阵(state transistion matrix)$F$,再加上外部影响 $u$,得到预测的当前时刻的状态量 $x^\prime$。以 2 维的匀速运动为例,$x$ 为:
对于匀速运动模型,经过时间 $\Delta t$ 后的预测状态量为:
由于假设当前运动为匀速运动,加速度为 0,加速度不会对预测造成影响,即:
公式 $x^\prime=Fx+u$ 演变为:
如果换成匀加速运动模型,就可以引入加速度 $a_x$ 和 $a_y$,$u$ 变为:
由于每次预测时,$\Delta t$ 的大小不固定,因此专门写一个函数SetF():
1 | void SetF(Eigen::MatrixXd F_in) |
再看预测模块的第二个公式:
该公式中,$P$ 被称为状态协方差矩阵(state covariance matrix),表示系统的不确定程度,$P$ 在卡尔曼滤波器初始化时会很大,随着越来越多的数据注入滤波器中,不确定程度会逐渐减小;$Q$ 是过程噪声协方差矩阵(process noise covariance matrix),即无法用 $x^\prime=Fx+u$ 表示的噪声,比如车辆运动时突然到了上坡,这个影响是无法用之前的状态转移估计的。以激光雷达为例,激光雷达只能测量点的位置,无法测量点的速度,因此对于激光雷达的协方差矩阵来说,对于位置信息,其测量较准确,不确定度较低;对于速度信息,不确定度较高。因此可以认为此处的 $P$ 为:
由于 $Q$ 对整个系统存在影响,但又不能确定对系统的影响有多大。工程上,一般将 $Q$ 设置为单位矩阵参与运算,即:
根据以上内容和公式:
就可以写出预测模块的代码了:
1 | void Prediction() |
代码:观测(Measurement)
观测模块的第一个公式是:
这个公式计算的是实际观测量 $z$ 与状态量预测值 $x^\prime$ 之间的差值 $y$。不同传感器的观测量一般不同,比如激光雷达测量的位置信号为 $x$ 方向和 $y$ 方向上的距离,毫米波雷达测量的是位置和角度信息。因此需要将状态量左乘一个矩阵 $H$,才能与观测量进行相应的运算,$H$ 被称为测量矩阵(Measurement Matrix)。激光雷达的观测量为:
其中 $x_m$ 和 $y_m$ 分别表示 $x$ 方向和 $y$ 方向上的测量值。由于 $x^\prime$ 是一个 4*1 的列向量,如果要与一个 2*1 的列向量 $z$ 进行减运算,需要左乘一个 2*4 的矩阵:
意即,对于激光雷达而言,测量矩阵 $H$ 为:
求得 $y$ 后,对 $y$ 乘以一个加权量,再加到原来的状态量预测量上去,就可以得到一个既考虑了观测量,又考虑了预测模型位置的状态量了。对于权值 $K$ 的计算,看下面的两个公式:
权值 $K$ 被称为卡尔曼增益(Kalman Gain),$R$ 是测量噪声协方差矩阵(measurement noise covariance matrix),表示的是测量值与真值之间的差值。一般情况下,传感器厂家会提供该值。$S$ 只是为了简化公式,写的一个临时变量。最后两个公式:
上述两个公式,实际上完成了卡尔曼滤波器的闭环,第一个公式是完成了当前状态量 $x$ 的更新,不仅考虑了上一时刻状态量的预测量,也考虑了观测量和整个系统的噪声;第二个公式根据卡尔曼增益,更新了系统的不确定度 $P$,用于下一个周期的运算,该公式中的 $I$ 为单位矩阵,维数为状态量的行数。将观测模块的五个公式写成代码如下:
1 |
|
可以发现MeasurementUpdate()函数的形参为“常引用”类型,这样既兼顾了参数传递效率(因为是引用,所以无需为传入的参数申请物理内存用以保存其值),又保证了数据安全(因为参数被const修饰了)。以激光雷达数据为例,使用以上滤波器,代码如下:
1 |
|
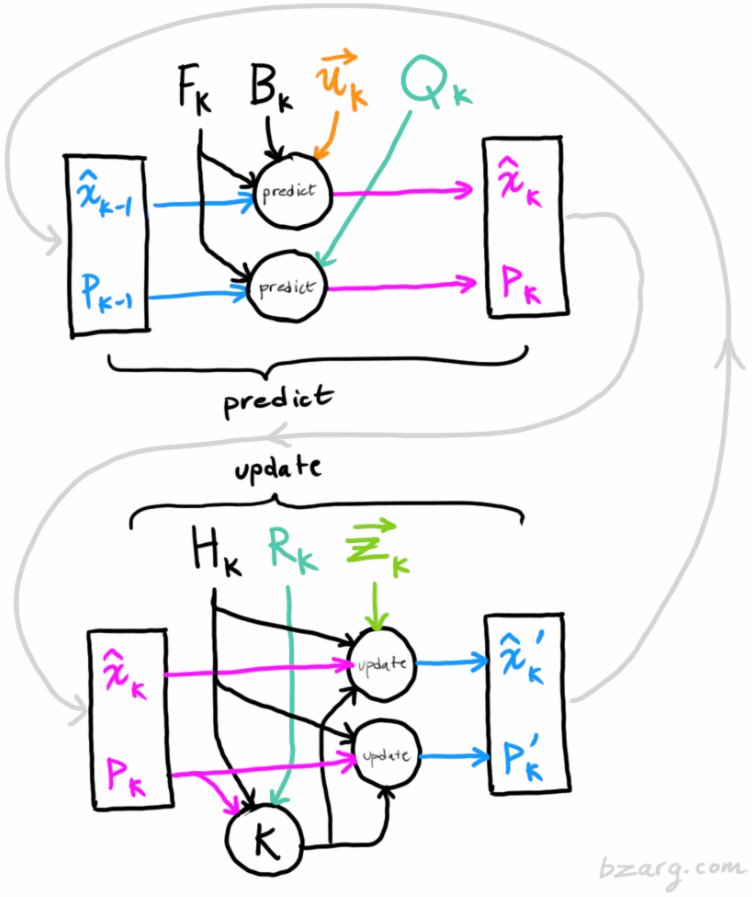
其中,GetLidarData()函数除了获取点的位置信息 $S_x$ 和 $S_y$ 外,还获取了当前时刻的时间戳,用于计算前后两帧的时间差 $\mathrm{d}t$。在经典卡尔曼滤波器基础上,还有扩展卡尔曼滤波器(EKF)和无迹卡尔曼滤波器(UKF),它们与经典卡尔曼滤波器的最大区别是状态转移矩阵 $F$ 和测量矩阵 $H$ 的不同。下图(原图出自这里)很形象地说明了经典卡尔曼滤波器的原理:
2 参考
- 无人驾驶技术入门(十三)| 手把手教你写卡尔曼滤波器
- How a Kalman filter works, in pictures

