本文章学习总结自知乎大 V陈光的《无人驾驶干货铺》专栏,查阅原文请移步这里。
1 正文
汽车控制单元(Vehicle Control Unit,VCU),通过CAN 总线与汽车的发动机、变速器、油门踏板、制动踏板、车身控制器等各种电子设备通信,读取各个控制单元的工作状态,并在需要时对它们进行控制。
VCU 记载了汽车底盘的状态(车速、油门踏板开度、制动踏板状态、方向盘转角等)、汽车车身的状态(车门状态、车窗状态、前照灯状态、转向灯状态等)以及发动机的状态(转速,输出扭矩、燃油消耗等)。
作为上层算法和底盘控制的接口,VCU 不仅承担着控制汽车加减速、转向的工作,还承担着将底盘信息精确且及时传递到算法层的工作。无人驾驶中常用的 VCU 信号有:汽车车速、汽车方向盘转角、汽车航向角变化率、油门踏板开度、制动踏板开度等。对 VCU 信号的应用有多种方式,这里主要介绍两种:
(1) 障碍物运动状态计算
车载传感器(激光雷达、毫米波雷达、摄像机)检测的障碍物速度都是相对速度,因此需要结合自车车速才能确定障碍物的绝对速度,进而根据绝对速度确定障碍物的运动状态(静止、靠近、远离);
(2) 航位推算
航位推算(Dead reckoning,DR)是指在丢失定位的情况下,使用自车传感器的信息,推测当前时刻自车所在位置与上一时刻所在位置的相对关系。在进行航位推算时,使用了汽车四轮运动学模型的简化模型——自行车模型,如下图所示:
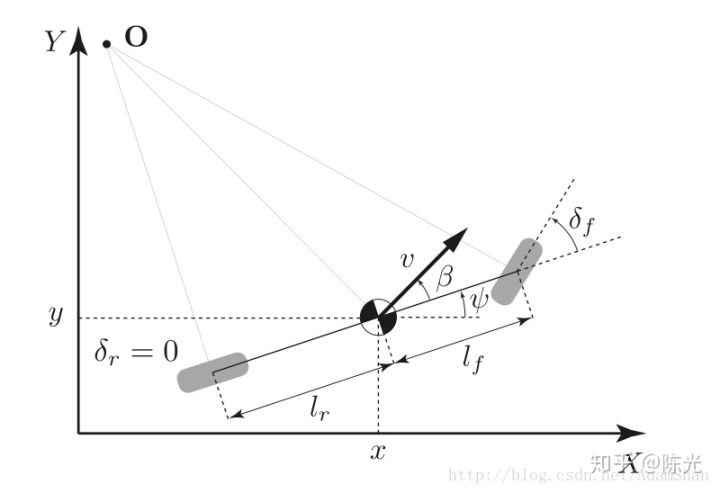
汽车的前轮转角为$δ_f$,但这并不意味着汽车的运动角度为$δ_f$。分别做垂直于后轮和前轮的射线并交于 O 点,两轮模型会绕 O 点进行运动,在微小时间段 dt 内,认为 O 点静止。连接 O 点和汽车的质心,汽车的实际运动方向$v$垂直于该线段。运动方向$v$与车身方向所成的夹角$β$一般被称为侧偏角(参考 1中表述有误,将$β$称为了偏航角——博主注),车身方向与大地坐标系横轴间的夹角称为横摆角。根据几何关系,可推出$β$和$δ_f$的近似关系为:
假设 t 时刻汽车的状态为$x_t$,$y_t$,经过微小时间段 dt 后的 t+1 时刻,状态为$x_{t+1}$,$y_{t+1}$,根据几何关系,可推出:
根据以上关系即可在丢失定位信息后的短时间内,依靠无人车自身的传感器信息,进行位置和位姿估计。
2 参考
- 无人驾驶技术入门(九)| 与生俱来的 VCU 信号
- 无人驾驶汽车系统入门(五)——运动学自行车模型和动力学自行车模型

