本文章学习总结自知乎大 V陈光的《无人驾驶干货铺》专栏,查阅原文请移步这里。
1 正文
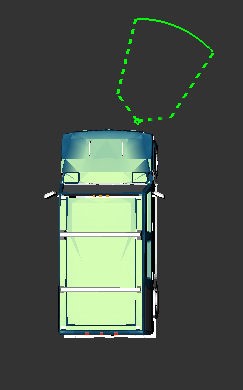
常见的超声波雷达有两种:第一种是安装在汽车前后保险杠上的,用于测量汽车前后障碍物的倒车雷达,称为 UPA,探测距离一般在 15~250cm 之间,单个 UPA 的探测范围示意图如下图所示:
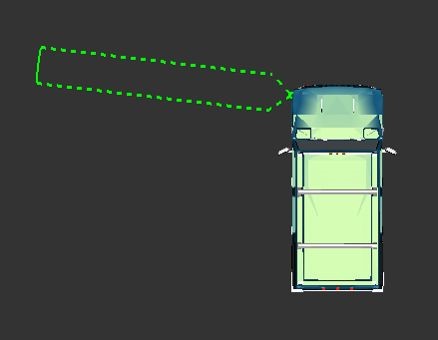
第二种是安装在汽车侧面的,用于测量侧方障碍物距离的超声波雷达,称为 APA,探测距离一般在 30~500cm 之间,更远的探测范围使得 APA 相比于 UPA 成本更高、功率更大,单个 APA 的探测范围示意图如下图所示:
虽然 UPA 和 APA 的探测距离和探测形状区别很大,但是可以用相同的数学模型对二者进行描述,描述一个超声波雷达的状态需要如下四个参数,其数学模型的示意图如下图所示:

- 参数 α:超声波雷达的探测角,一般 UPA 的探测角为 120° 左右,APA 的探测角比 UPA 小,大概为 80°
- 参数 β:超声波雷达检测宽度范围的影响因素之一,该角度一般较小,UPA 的 β 角为 20° 左右,APA 的 β 角比较特殊,为 0°
- 参数 R:同样是超声波雷达检测宽度范围的影响因素之一,UPA 和 APA 的 R 值差别不大,均在 0.6m 左右
- 参数 D:超声波雷达的最大量程,UPA 的最大量程为 2 米~2.5 米,APA 的最大量程至少 5 米,目前已有超过 7m 的 APA 雷达在业内使用
超声波雷达的特性:
(1) 温度敏感
由于超声波雷达的探测介质为声波,因而超声波雷达的测距结果具有温度敏感性。
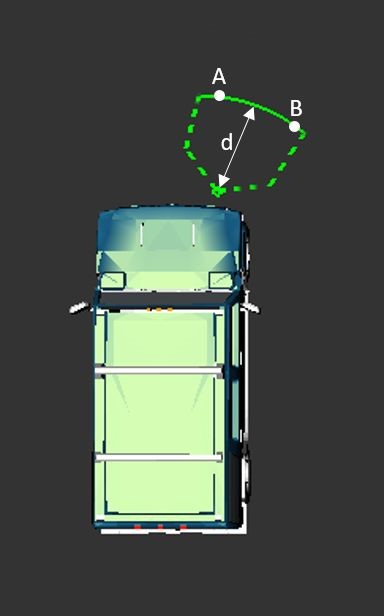
(2) 无法精确描述障碍物位置
超声波雷达在工作时会返回一个探测距离的值,如下图所示。处于 A 处和 B 处的障碍物会返回相同的探测距离 d,在仅知道探测距离 d 的情况下,通过单个雷达的信息无法确定障碍物所处位置为 A 还是 B
超声波雷达在自动驾驶中可以用于泊车库位检测和高速横向辅助。
2 参考
- 无人驾驶技术入门(八)| 被严重低估的传感器超声波雷达

