本文章学习总结自知乎大 V陈光的《无人驾驶干货铺》专栏,查阅原文请移步这里。
1 正文
激光雷达根据安装位置不同,可分为两类:一类安装在无人车四周,其激光线束一般小于 8,常见的有单线激光雷达和四线激光雷达;另一类安装在无人车车顶,其激光线束一般不小于 16,常见的有 16/32/64 线激光雷达。
单束激光发射器在激光雷达内部匀速旋转,每旋转一个小角度即发射一次激光,轮巡一定角度后,就生成了一帧完整的数据。因此,单线激光雷达的数据可视作同一高度的一排点阵,单线激光雷达的数据缺少一个维度,只能描述线状信息,无法描述面。
四线激光雷达将四个激光发射器进行轮询,一个轮询周期后,得到一帧的激光点云数据,四条点云数据可以组成面状信息,这样就能够获取障碍物的高度信息,根据单帧的点云坐标可得到障碍物的距离信息,根据多帧的点云坐标,对距离信息做微分处理,可得到障碍物的速度信息。16/32/64 线的激光雷达的感知范围为 360°,常被安装在无人车顶部。N 线激光雷达的点云数据结构如下图:
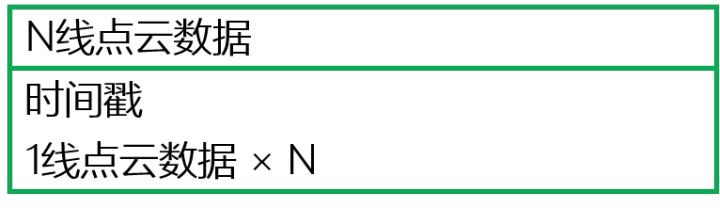
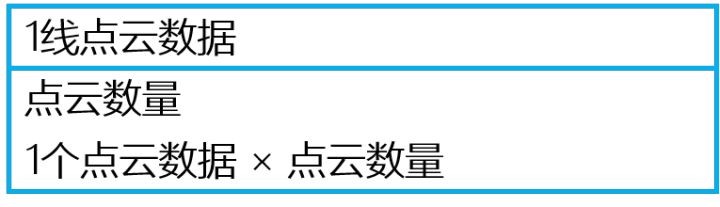
每一线点云的数据结构由点云数量和每一个点云的数据结构组成。由于激光雷达的数据采集频率及单线的点云数量都是可以设置的,因此 1 线点云数据中需要包含点云数量这个信息:
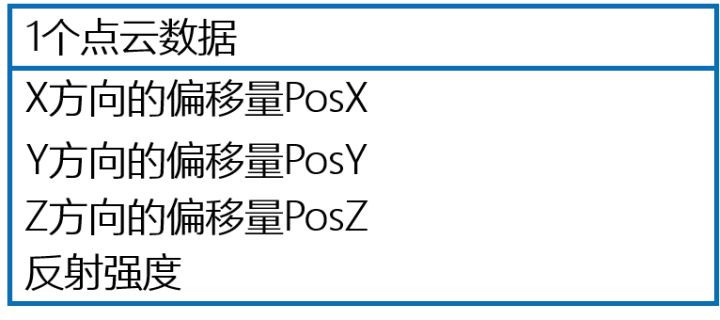
最底层的是单个点云的数据结构。点的表达既可以使用 theta/r 的极坐标表示,也可以使用 x/y/z 的三维坐标表示。每个点云除了坐标外,还有一个很重要的元素,那就是激光的反射强度。激光在不同材料上的反射强度是不一样的。以三维坐标的表示方法为例,单个点云的数据结构如下图所示,X/Y/Z 方向的偏移量以激光雷达的安装位置作为原点:
激光雷达点云数据的一般处理方式是:
- 数据预处理:坐标转换,去噪声等
- 聚类:根据点云距离或反射强度
- 特征提取
- 根据特征进行分类等后处理
激光雷达能胜任的工作包括:
(1) 障碍物检测与分割

利用高精度地图限定感兴趣区域(Region of Interest,ROI)后,基于全卷积深度神经网络学习点云特征并预测障碍物的相关属性,得到前景障碍物检测与分割。
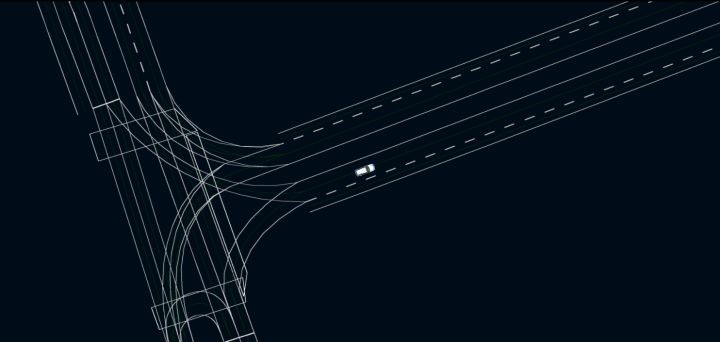
(2) 可通行空间检测
利用高精度地图限定 ROI 后,可以对 ROI 内部(比如可行驶道路和交叉口)的点云的高度及连续性信息进行判断点云处是否可通行。
(3) 高精度电子地图制图与定位
利用多线激光雷达的点云信息与地图采集车载组合惯导的信息,进行高精地图制作。自动驾驶汽车利用激光点云信息与高精度地图匹配,以此实现高精度定位。
(4) 障碍物轨迹预测
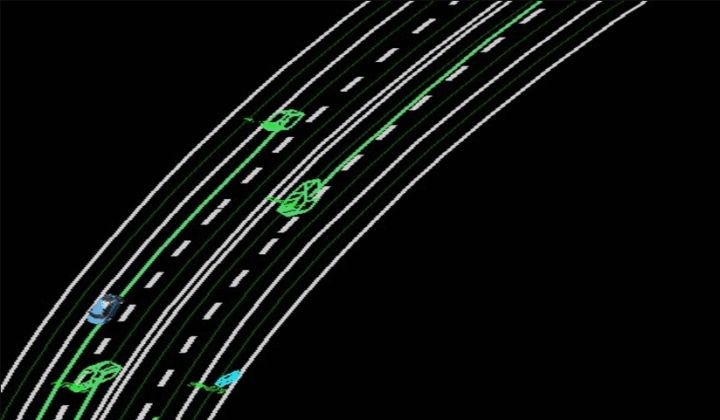
根据激光雷达的感知数据与障碍物所在车道的拓扑关系(道路连接关系)进行障碍物的轨迹预测,以此作为无人车规划(避障、换道、超车等)的判断依据。
2 参考
- 无人驾驶技术入门(六)| 工程师又爱又恨的激光雷达

